Binome2018-1 : Différence entre versions
| Ligne 67 : | Ligne 67 : | ||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
= Répartition des tâches = | = Répartition des tâches = | ||
Version du 9 mai 2019 à 15:25
Sommaire
Introduction
Durant notre année nous avons du réaliser des robots dans le domaine des proies ou prédateurs.
Les prédateurs doivent repérer et rattraper des proies. Ils sont donc lourd et on besoin de moteurs puissants. Les proies émettent un signal qui permet aux prédateurs de les détecter et sont donc ainsi identifiées grâce aux tsops. Les prédateurs possèdent un système de réception infra-rouge directionnel permettant de s'orienter dans la phase de poursuite. Les prédateurs émettent aussi un signal infra-rouge permettant ainsi aux proies de savoir qu'elles sont prises en chasse. Les prédateurs n'ont pas besoin de connaître le relief de la pièce une fois la poursuite lancée. En effet, comme les proies ne savent pas voler, c'est à elle d'éviter les murs ce qui permet d’alléger le programme des robots prédateurs.
Les proies et les prédateurs doivent être clairement autonome.
La taille du robot n'est pas fixé. Mais il est préférable d'avoir un robot plus rapide pour les proies là où un robot plus massif sera conseillé pour les robots prédateurs. Nous avons choisi pour notre projet de faire un robot prédateur.
Compétences et matériel utilisé
Compétences :
- avancer et tourner ;
- s'orienter par rapport aux signaux que les tsops lui transmettent lors d'une course poursuite ;
- éventuellement émettre des signaux pour complexifier et rendre plus tacte la chasse ;
Matériel ;
- Nous avons pu nous inspirer des robots des années précédentes pour construire notre robot. Nous étions même autorisé à les détruises pour récupérer leur matos. Ces robots ne sont pas forcément totalement fonctionnels mais les parties déjà réalisées nous ont fait gagner du temps que nous avons pu consacrer à la programmation du robot.
- Pour faire le support du robot c'est à dire son châssis nous avion utilisé du plexiglas. Pour faire la découpe du support, nous avons utilisé la découpe laser.
Il faut faire attention de bien optimiser l'espace de son châssis. Dans l'absolue il vaut mieux faire trop grand et faire tenir le tout avec des ajouts non prévus que d'avoir un support trop petit et de devoir retirer du matos initialement prévu pour le robot.
Les montages photographiques ci-dessous présentent les éléments permettant de construire un robot sans trop souffrir et les composants de base pour construire un robot plus optimisé et personnalisé.


Des robots miniatures peuvent être réalisés en utilisant des servo-moteurs continus et des pièces en plexiglas ou en contreplaqué découpées à l'aide de la découpeuse laser du Fabricarium. Certaines formes plus complexes peuvent éventuellement être réalisées à l'aide des imprimantes 3D du Fabricarium. Il est possible d'imprimer des pneus avec du PLA flexible. Pour les fixations vous avez de la visserie (vis, écrous, entretoises).
Logiciels
Pour concevoir un schéma propre du câblage de votre robot vous pouvez utiliser fritzing. Tous les composants de notre robot ne sont pas modélisés dans fritzing. Donc voici une liste de composants supplémentaires mis au points par des élèves IMA de la promotion 2017 (Julie Debock, Hugo Vandenbunder et Sylvain Verdonck) et revus par les encadrants du bureau d'études :
- détecteur ultrason : Fichier:UltrasonicSensor HCSR04.zip
- contrôleur de moteurs : Fichier:MotorDriver Pololu md08a.zip
Pour la découpe laser nous avons utilisé ce logiciel inkscape.
Pour la conception 3D solidwork est très utilisé. Mais nous ne l'avons pas utilisé. Pour le développement avec les plateformes Arduino, utilisez l'environnement du même nom. La programmation se fait en C++ ce qui est relativement abordable. Il y a de nombreux site internet qui proposent de claires explication. Enfin les programmes que nous devons réaliser restent largement dans nos cordes ce qui ne pose aucun problème.
Pour vous aider dans la conception des circuits imprimés, nous vous proposons des circuits modélisés avec fritzing que vous pourrez adapter à vos robots. Ces circuits ont été ébauchés par des élèves IMA et retouchés par les encadrants du bureau d'études. Ce qui est pratique pour tester un composant à l'avance et ainsi ne pas prendre du retard.
Un premier circuit de type bouclier Arduino permet d'éviter tous les câbles entre l'Arduino et les contrôleurs de moteurs : Fichier:Robot bouclier.zip. Ce circuit est prévu pour 4 moteurs, les binômes avec des chassis bi-moteurs devront le simplifier. Après téléchargement, prenez soin de modifier le suffixe .zip en .fzz.
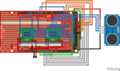
Bouclier : plaque d'essai

Bouclier : schéma
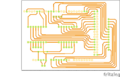
Bouclier : circuit imprimé



Système embarqué
Il n'y a pas de télécommandes pour controler le robot. Autrement dit, il doit être 100% autonome. Il possède donc un sonar, un détecteur infrarouge et une batterie.
Répartition des tâches
Nous n'imposons pas de répartition rigide des tâches. Pour qu'une démonstration puisse se faire en fin de bureau d'étude il faut au moins un robot proie et un robot prédateur.
Robot proie
Un robot proie est constitué comme suit :
- un châssis roulant, un contrôleur pour chaque paire de moteurs, un Arduino Uno ou un circuit électronique maison à base de micro-contrôleur ATMega328p ;
- des détecteurs ultrason pour éviter les collisions ;
- un récepteur infra-rouge TSOP pour décoder les signaux infra-rouges modulés ;
- un émetteur infra-rouge pour émettre un signal signalant le robot comme une proie ;
- un dispositif récepteur à courte distance pour simuler la capture par un prédateur, vous pouvez partir sur l'idée d'un capteur à effet Hall.
Dans son mode autonome, le robot se promène dans la pièce en évitant les obstacles de façon tranquille et prévisible. Quand il repère un prédateur à son signal infra-rouge, la proie se déplace plus vivement avec de brusques changements de direction. Quand le détecteur à courte distance indique que le robot proie est à portée du prédateur, il s'arrête. Faire clignoter des LED rouges serait assez à propos.
Vous pouvez ajouter un mode télécommande au robot. La modification la plus simple consiste à recevoir des ordres d'une télécommande infra-rouge. Le robot pourrait ainsi recevoir des ordres pour accélèrer ou décélérer, pour tourner tranquillement ou brusquement.
Pour aller plus loin vous pouvez équiper votre robot d'une Raspberry PI 3 communiquant avec la carte de contrôle en série. Le robot peut alors être téléguidé par un téléphone.
Robot prédateur
Un robot prédateur est constitué comme suit :
- un châssis roulant, un contrôleur pour chaque paire de moteurs, un Arduino Uno ou un circuit électronique maison à base de micro-contrôleur ATMega328p ;
- un détecteur ultrason pour ne pas rentrer dans les obstacles ;
- des récepteurs infra-rouges TSOP pour décoder les signaux infra-rouges modulés ;
- un émetteur infra-rouge pour émettre un signal signalant le robot comme un prédateur ;
- un dispositif émetteur à courte distance pour simuler la capture d'une proie, par exemple un électro-aimant.
Dans son mode autonome, le robot tourne en rond à la recherche d'une proie. Dès qu'il en repère une, il se précipite vers elle en se calant sur son signal infra-rouge. Quand le prédateur pense être à porté de la proie, il active la communication à faible portée. Cette activation est temporaire pour donner une chance à la proie de s'échapper.
Vous pouvez ajouter un mode télécommande au robot. La modification la plus simple consiste à recevoir des ordres d'une télécommande infra-rouge. Le robot pourrait ainsi recevoir des ordres de direction, de vitesse et d'activation de la communication "capture".
Pour aller plus loin vous pouvez équiper votre robot d'une Raspberry PI 3 communiquant avec la carte de contrôle en série. Le robot peut alors être téléguidé par un téléphone.
Réalisations des binômes
| Numéro | Elèves | Type de robot | Page |
|---|---|---|---|
| Binôme 1 | Ziyad Houssaini* / Lucas Houziaux* | Proie | Binôme 1 2017/2018 |
| Binôme 2 | Théo Evrard! / Valériane Salingue* | Prédateur | Binôme 2 2017/2018 |
| Binôme 3 | Valentin Kerskens° / Kadir Tekin* | Proie | Binôme 3 2017/2018 |
| Binôme 4 | Alex Lagneau* / Adrien Piednoel! | Proie | Binôme 4 2017/2018 |
| Binôme 5 | Clémence Béchet! / Pierre Gautreau* | Prédateur | Binôme 5 2017/2018 |
| Binôme 6 | Claire Devisme° / Noémie Lounici! | Prédateur | Binôme 6 2017/2018 |
| Binôme 7 | Nour Ekhlas* | Prédateur | Binôme 7 2017/2018 |
| Binôme 8 | Vincent Dubois* | Proie | Binôme 8 2017/2018 |
| Binôme 9 | Raphaël Bonvalet* / Damien Tillaux* | Proie | Binôme 9 2017/2018 |