Binome2015-3 : Différence entre versions
De Wiki de bureau d'études PeiP
(→Journal de Bord) |
(→Journal de Bord) |
||
| Ligne 31 : | Ligne 31 : | ||
Jour 4 | Jour 4 | ||
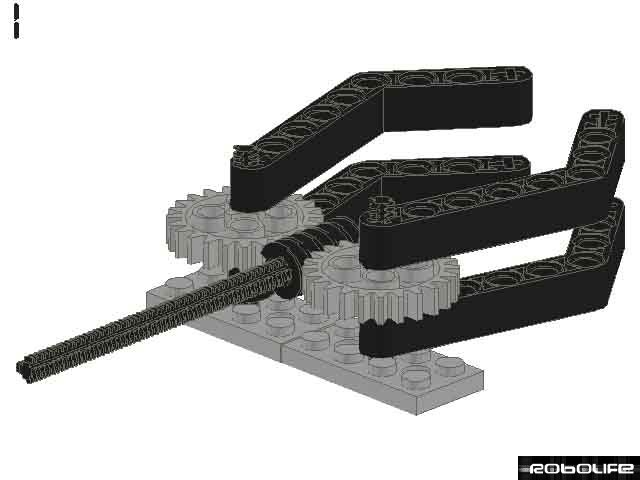
| − | Imagination de la pince | + | *Imagination de la pince |
<gallery style="margin: 0 auto;"> | <gallery style="margin: 0 auto;"> | ||
Fichier:schéma_pince.jpg | Fichier:schéma_pince.jpg | ||
Version du 29 janvier 2016 à 17:33
Sommaire
Aptitudes du robot
- Le robot doit éviter des obstacles (autres robots,buts,...)
- Le robot doit repérer les lignes du terrain
- Le robot doit reconnaître la balle
- Le robot doit savoir récupérer la balle
- Le robot doit savoir envoyer la balle
- Le robot doit savoir communiquer avec le ramasseur, les buts et le robot adverse.
Journal de Bord
Jour 1
- Choix composants robots joueur: châssis deux roues
- Début de l'assemblage du châssis.
Jour 2
Finalisation montage moteur + boite piles + roue libre
programme arduino fonctionnement moteur
.jpg)
.jpg)
Taches à faire
- soudure circuit électrique du contrôleur de moteurs
- algorithme et circuit électrique permettant de faire fonctionner les moteurs
Jour 4
- Imagination de la pince

Photos Chassis

.jpg)
.jpg)
Déroulement d'un match
- le joueur sort de son garage
- il cherche la balle
- il prend la balle et demande l'activation de la balise du but
- il tire dans le but adverse et demande la désactivation de la balise du but
- il y a un but
- le robot joueur retourne dans son garage, l'algorithme du robot retourne à l'état 1
- il n'y a pas but
- l'algorithme du robot retourne à l'état 2
Contrôler moteur arduino
http://bildr.org/2012/04/tb6612fng-arduino/ http://www.mon-club-elec.fr/pmwiki_mon_club_elec/pmwiki.php?n=MAIN.MaterielInterfaceMoteurTB6612
{kind=link}