Binome2015-9 : Différence entre versions
| Ligne 1 : | Ligne 1 : | ||
| − | <include iframe src="https://www.youtube.com/embed/ttwgyzTrOzc" width="960px" height="540px" frameborder="0" scrolling="yes" /> | + | <include iframe src="https://www.youtube.com/embed/ttwgyzTrOzc" width="960px" height="540px" frameborder="0" scrolling="yes" style="float:right;" /> |
__TOC__ | __TOC__ | ||
<br style="clear: both;"> | <br style="clear: both;"> | ||
Version du 22 mars 2016 à 20:35
Sommaire
- 1 Introduction
- 2 Journal de bord
- 2.1 JOUR 1 : 18/01/2016
- 2.2 JOUR 2 : 21/01/2016
- 2.3 JOUR 3 : 25/01/2016
- 2.4 JOUR 4 : 28/01/2016
- 2.5 JOUR 5 : 29/01/2016
- 2.6 JOUR 6 : 01/02/2016
- 2.7 JOUR 7 : 04/02/2016
- 2.8 JOUR 8 : 08/02/2016
- 2.9 JOUR 9 : 11/02/2016
- 2.10 JOUR 10 : 22/02/2016
- 2.11 JOUR 11 : 25/02/2016
- 2.12 JOUR 12 : 29/02/2016
- 2.13 JOUR 13 : 03/03/2016
- 2.14 JOUR 14 : 07/03/2016
- 2.15 JOUR 15 : 10/03/2016
- 2.16 JOUR 16 : 14/03/2016
- 2.17 JOUR 17 : 17/03/2016
- 2.18 JOUR 18 : 21/03/2016
- 3 Réalisation mécanique
- 4 Réalisation électronique
- 5 Résultat final et tests
- 6 But
- 7 Conclusion
Introduction
Le choix de ce bureau d'étude (BE) s'est fait avant tout par passion pour l'électronique et l'informatique. En effet, nous savions grâce à la page wiki que ce projet allait combiner ces deux domaines avec en prime une partie mécanique. L’abandon des Lego Mindstorms nous a également aidé dans notre décision, puisque nous trouvions plus intéressant de concevoir ce robot par nous même.
Après une petite heure de présentation du BE, l'ensemble des groupes s'est concerté pour le choix du projet. Nous nous sommes répartis les différents acteurs du "jeu de balle" de telle sorte qu'il soit possible de réaliser une démonstration à l’issue du BE. Nous avons choisi de travailler sur un robot joueur ainsi qu'une cage de but.
Objectifs du robot
Fonctions diverses
- Détecter les lignes extérieures
- Détecter les obstacles
- Suivre une ligne
Phase de démarrage
- Recevoir les ordres
- Sortir du garage
Phase de jeu
- Repérer la balle
- Se déplacer vers la balle
- Capturer la balle
- Demander l’activation du but
- Repérer le but adverse
- Tirer
Phase finale
- Retourner au garage

Suivre une ligne
- Soon
Détection obstacles
- Soon
Détection lignes
Journal de bord
JOUR 1 : 18/01/2016
- Choix du robot compétiteur
- Choix du châssis “2 roues” (moins de contraintes)
- Création d'un document collaboratif
- Réflexions sur les objectifs du robot (liste des fonctions à réaliser)
- Première ébauche de l'algorithme “Suivi des lignes“
JOUR 2 : 21/01/2016
- Test capteur ultrasons (distance)
- Test capteur RGB (imprécisions)
- Objectifs séance 3 : soudure, test reste des capteurs et actionneurs
JOUR 3 : 25/01/2016
- Soudures moteurs et contrôleur
- Montage du châssis
- Branchement électrique du contrôleur et des moteurs + renseignements sur le contrôleur
- De but de réflexion sur le mécanisme de la pince
JOUR 4 : 28/01/2016
- Programme pour le contrôle des moteurs via le contrôleur (fonctionnel)
- Premier test sur la réception de signaux infrarouges
- Le robot tirera grâce à sa vitesse

Montage contrôleur moteur

JOUR 5 : 29/01/2016
- Programme capteur de lignes
- Le robot se déplace et esquive les obstacles (1 seul capteur ultrasons)
- Quelques soucis avec des files défectueux
- Début d’agencement des éléments sur le châssis
JOUR 6 : 01/02/2016
- Prise en main du module ZigBee
- Allumage d’une LED à distance pour les tests
JOUR 7 : 04/02/2016
- Programme suiveur de lignes
- Problème mécanique pour les tests (capteurs pas assez proches du sol)
- Programme fonctionne théoriquement
- Soudage capteurs
JOUR 8 : 08/02/2016
- Premiers essais de PCB (Fritzing)
- Programme robot télécommandé (à l’aide des touches du PC)
JOUR 9 : 11/02/2016
- Plan de la pince et mesures
- Plan du support à capteurs de lignes
JOUR 10 : 22/02/2016
- Recherche de la balle (3 photo transistors pour le moment)
- Problème de résistance trop faible
- Contrôleur qui ne fonctionne pas avec 1 seul ordre moteur
JOUR 11 : 25/02/2016
- Premiers essais du suiveur de ligne à l'aide de 2 capteurs (il ne gère pas encore les virages)
- Changement des résistances (Recherche de la balle opérationnelle)
- Création des pièces de la pince sur Solidworks (support, engrenages, bras de pince)

Modélisation 3D de la pince sans le support capteurs

JOUR 12 : 29/02/2016
- Réservation de l'imprimante 3D
- Suiveur de ligne complet avec 4 capteurs (il gère maintenant les virages)
JOUR 13 : 03/03/2016
- Commencement du PCB sur Fritzing (PCB unique sous forme de shield)
- Impression du support et des 2 engrenages (problème de dimensionnement de la garde au sol et de la fente)

Support et engrenages

Support sur robot


JOUR 14 : 07/03/2016
- PCC terminé (il faut maintenant le faire vérifier auprès des enseignants)
Ébauche PCB

JOUR 15 : 10/03/2016
- Réalisation du circuit électrique du but (photo)
- Programme du but terminé, encore quelques bricoles à modifier
- Problème d'incrémentation du score réglé
- Toujours pas d'accord sur les communications entre robots et buts

Afficheur du but

JOUR 16 : 14/03/2016
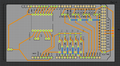
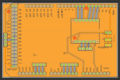
- Les 3 PCB sont terminés
- Le suiveur de ligne est complet, le robot s'arrête si un obstacle est sur son chemin (vidéo)
- Rajouter des trous de perçage sur les 2 PCB non-shield
PCB contrôleur

PCB suiveurs de lignes
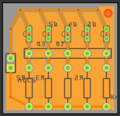
PCB phototransistors


JOUR 17 : 17/03/2016
- Modification du PCB contrôleur qui était encore en top et non en bottom
- Les PCB ont été vérifiés
- Recherche de la balle complet, le robot cherche sans sortir du terrain
JOUR 18 : 21/03/2016
- Modification de la recherche de balle, plus performant
- Réception des 3 PCB
- Bricolage d'un support de capteurs
- Montage du support et des capteurs
- Problème avec le suiveur de lignes, capteurs trop alignés

Support capteurs

Support capteurs


Réalisation mécanique
Choix du modèle
Pour cette saison 2015-2016, les robots ne sont plus construits avec le kit de construction Lego Mindstorms. C'est pourquoi, nous avons passé une partie de notre première séance à débattre sur les avantages et inconvénients des deux châssis proposés (2 ou 4 roues motrices). Nous avons finalement opté pour le modèle 2 roues pour les raisons suivantes :
- Plus léger donc plus mobile
- Plus maniable grâce à sa roue libre (virage rapide)
- Moins gourmand en énergie (2 moteurs contre 4)
- 2 moteurs à contrôler via l'Arduino
- Moins de risque de patinage
Au final, les avantages en faveur du 4 roues étaient minimes. En théorie, il est censé se déplacer plus rapidement grâce à l'usage de ses 4 moteurs. Seulement, sur un terrain de petite taille, il est préférable que le robot soit maniable et réactif par rapport à son environnement. Ces propos ne sont bien sur que des spéculations. Le temps étant limité, le choix devait se faire rapidement.
Conception de la pince
La pince représente la grosse partie mécanique du projet. Sa réalisation s'est effectuée en plusieurs étapes.
- Réflexion
On ne s'est pas empressé à réaliser un fichier 3D. On a d'abord fixé les objectifs de cette pince ainsi que les contraintes qui lui seront liées. Pour le mécanisme d'ouverture et de fermeture, on a choisi un système composé de deux engrenages avec au- dessus de l'un d'eux, un servomoteur. La balle étant sphérique, il nous a semblé judicieux de réaliser les bras de la pince de manière circulaire. Concernant le mécanisme d'éjection, nous avons fait le choix de ne pas en faire mais d'éjecter la balle grâce à une accélération soudaine du robot. Cet ensemble sera maintenu sur un support qui lui-même sera fixé au châssis du robot à l'aide d'une "mâchoire". En ce qui concerne les contraintes, le robot doit être capable de distinguer les ondes infrarouges du but et de la balle. Comme solution, on a décidé de positionner les phototransistors sur le devant de la pince, nous évitant ainsi la réalisation d'un système pour cacher la balle.
- Mesures et dessins
Cette étape est primordiale pour commencer la conception 3D. On a réalisé quelques esquisses sur papier (voir photos) représentant plusieurs vues de la pince. On a ensuite pris les mesures nécessaires pour les reporter sur les schémas.
- Conception 3D
Ayant déjà eu des expériences avec la modélisation 3D, on a pu sauter l'étape de l’apprentissage. On a choisi, par habitude, d'utiliser le logiciel Solidworks pour concevoir les pièces. Mis à part quelques difficultés pour dessiner des pièces courbées, nous n'avons rencontré aucun problème majeur lors de la réalisation.
- Impression 3D
Fichiers au bon format (STL), créneau réservé, direction le Fabricarium pour l'étape la plus concrète : l'impression. Pour notre première visite, un élève en 4ème année nous a gentiment expliqué le fonctionnement des deux imprimantes. Compte tenu de notre besoin de précision sur les pièces, il nous a conseillé plusieurs réglages comme un taux de remplissage bas. Pour cette première impression, on avait choisi de ne faire que le support et les engrenages, ce qui nous aurait permis d'enfin fixer nos capteurs. Mais malheureusement, le support n'était pas dimensionné correctement, la barre du bas était trop basse et trop fine. On a donc repris les mesures et revu le modèle 3D.
A suivre ...
Conception du support capteurs
Le support des capteurs est intégré au support de la pince. Il s'agit d'une simple barre en plastique située au ras du sol sur laquelle on peut venir visser les capteurs de lignes.
Réalisation électronique
Capteurs et composants
Détailler pour chaque capteur son rôle précis (général) et son fonctionnement (récupération des données)
Circuits imprimés
Expliquer nos choix
Programmation
- Résumer l'approche utilisée pour atteindre les objectifs
- Illustrer avec des morceaux de code
Sortie du garage
Prochainement ...
Repérage de la balle
Prochainement ...
Déplacement vers la balle
Prochainement ...
Capture de la balle
Prochainement ...
Demande d’activation du but
Prochainement ...
Repérage du but adverse
Prochainement ...
Tir
Prochainement ...
Retour au garage
Prochainement ...
Résultat final et tests
Inclure des images et vidéos Faire une sorte de timelapse de la construction
But
Réalisation mécanique
- Plans vectoriels
- Découpe laser
Réalisation électronique
- Matériels utilisés
- Programmation
Résultat final et tests
Inclure des images et vidéos
Conclusion
- Ne pas oublier de parler des problèmes rencontrés (dans chaque partie)
- Apport de connaissances
- Tenir des délais
- Trouver des solutions
- Travailler en autonomie
- Liberté offerte sur le robot
- Pluridisciplinaires (mécanique, informatique, électronique)
- Travail d'équipe, répartition efficace des tâches
- Projet ludique
- Investissement important