Binome2015-3 : Différence entre versions
De Wiki de bureau d'études PeiP
(→Jour 1) |
(→Photos Chassis) |
||
| Ligne 72 : | Ligne 72 : | ||
*Programmation servomoteur. Le servomoteur a été programmé pour fonctionner avec la pince. | *Programmation servomoteur. Le servomoteur a été programmé pour fonctionner avec la pince. | ||
| − | + | = Photos Chassis = | |
<gallery style="margin: 0 auto;"> | <gallery style="margin: 0 auto;"> | ||
Fichier:Accessoires_robot.jpg | Fichier:Accessoires_robot.jpg | ||
| Ligne 78 : | Ligne 78 : | ||
Fichier:Chassis(2).jpg | Fichier:Chassis(2).jpg | ||
</gallery> | </gallery> | ||
| − | |||
== Pince == | == Pince == | ||
Version du 24 avril 2016 à 16:07
Sommaire
Aptitudes du robot compétiteur
- Le robot doit éviter des obstacles (autres robots,buts,...)
- Le robot doit repérer les lignes du terrain
- Le robot doit reconnaître la balle
- Le robot doit savoir récupérer la balle
- Le robot doit savoir envoyer la balle
- Le robot doit savoir communiquer avec le ramasseur, les buts et le robot adverse.
Journal de Bord
Jour 1
- Choix composants robots joueur: châssis deux roues
- Début de l'assemblage du châssis.
Jour 2
- Finalisation montage moteur + boite piles + roue libre sur le chassis
- programme arduino fonctionnement moteur
.jpg)
.jpg)
Jour 3
- mise en marche des moteurs

Jour 4
- Imagination de la pince

Jour 5
- Début de la Modélisation de la pince à l'aide du logiciel free cads
Jour 6-7
- Suite de la modélisation de la pince
Jour 8
- programmation capteurs infrarouges + servo-moteur
03/03/2016
- Début de la modélisation du PCB sur Fritzing
- Pince robot imprimée
- Création du programme de détection de la balle par les 5 capteurs infrarouges placés devant le robot.
07/03/2016
- Modélisation du PCB moteur qui sera placé au dessus de la carte arduino.

- Programmation de déplacement précis du robot. Le but étant de faire pivoter le robot précisément afin qu'il puisse facilement récupérer la balle.
14/03/2016
- Retour sur décision. Nous allons utiliser 2 capteurs de lignes, nous nous sommes rendu compte qu'il était impossible de faire suivre une ligne au robot avec un unique capteur de ligne.
- Programmation servomoteur. Le servomoteur a été programmé pour fonctionner avec la pince.
Photos Chassis

.jpg)
.jpg)
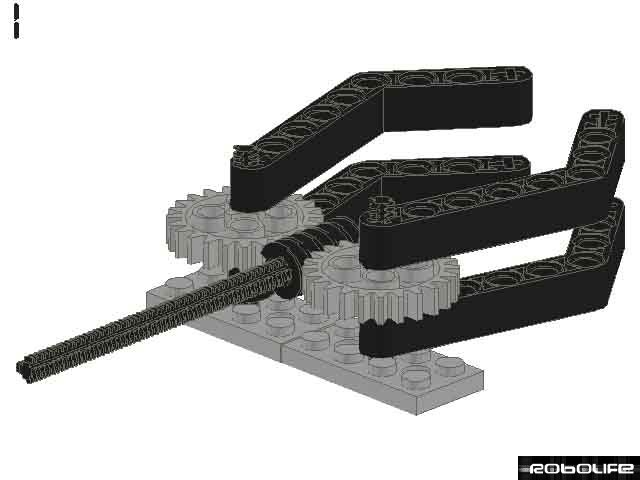
Pince
Le système utilisé pour prendre et propulser la balle infrarouge est une pince qui éjecte la balle, lors de son ouverture.

La motorisation de cette pince est réalisé par un unique servo-moteur. Un train d'engrenage servira à transmettre la rotation du servomoteur aux 2 parties de la pince.
Déroulement d'un match
- le joueur sort de son garage
- il cherche la balle
- il prend la balle et demande l'activation de la balise du but
- il tire dans le but adverse et demande la désactivation de la balise du but
- il y a un but
- le robot joueur retourne dans son garage, l'algorithme du robot retourne à l'état 1
- il n'y a pas but
- l'algorithme du robot retourne à l'état 2
Contrôler moteur arduino
http://bildr.org/2012/04/tb6612fng-arduino/ http://www.mon-club-elec.fr/pmwiki_mon_club_elec/pmwiki.php?n=MAIN.MaterielInterfaceMoteurTB6612
{kind=link}