Binome2018-5 : Différence entre versions
(→Entrée 13 : 25 mars) |
(→Entrée 14 : 28 mars) |
||
| Ligne 62 : | Ligne 62 : | ||
== Entrée 14 : 28 mars == | == Entrée 14 : 28 mars == | ||
| − | Nous | + | Nous nous sommes concentrés sur le code pour Hunting Viper ; |
== Entrée 15 : 1 avril == | == Entrée 15 : 1 avril == | ||
Version du 23 mai 2019 à 09:48
Sommaire
- 1 Objectif à atteindre
- 2 Journal de bord
- 2.1 Entrée 1 : 14 janvier 2019
- 2.2 Entrée 2 : 31 janvier 2019
- 2.3 Entrée 3 : 4 février 2019
- 2.4 Entrée 4 : 11 février
- 2.5 Entrée 5 : 25 février
- 2.6 Entrée 6 : 28 février
- 2.7 Entrée 7 : 4 mars
- 2.8 Entrée 8 : 7 mars
- 2.9 Entrée 9 : 11 mars
- 2.10 Entrée 10 : 14 mars
- 2.11 Entrée 11 : 18 mars
- 2.12 Entrée 12 : 21 mars
- 2.13 Entrée 13 : 25 mars
- 2.14 Entrée 14 : 28 mars
- 2.15 Entrée 15 : 1 avril
- 2.16 Entrée 16 : 4 avril
- 2.17 Entrée 17 : 25 avril
- 2.18 Entrée 18 : 29 avril
- 2.19 Entrée 19 : 2 mai
- 2.20 Entrée 20 : 6 mai
- 2.21 Entrée 21 : 9 mai
- 2.22 Entrée 22 : 16 mai
- 2.23 Entrée 23 : 23 mai
Objectif à atteindre
Dans ce bureau d'études, il nous est demandé de réaliser un robot dans une optique d'interaction chasseur-proie ; un robot (la proie) doit échapper à son poursuivant (le chasseur). Le robot doit être soit autonome, soit dirigé par une télécommande.
Nous sommes partis sur un robot prédateur autonome, car le frisson de la chasse est une sensation tellement ... irrésistible. Le nom du projet : Hunting Viper, ou la vipère chassante.
Le bureau d'étude peut se décomposer en 3 parties : une partie châssis, une autre électronique et une dernière programmation. La réalisation du châssis, le corps du robot, a été réalisé par Robin ; la seconde a été plus un travail collectif, tandis que la dernière fut exécuté par Alexandre.
AJOUTER D'AUTRES ELEMENTS : cahier des charges + photos des différents éléments + conclusion sur les apports du BE
Journal de bord
Entrée 1 : 14 janvier 2019
Au cours de cette séance, les encadrants nous ont expliqués les principales composantes de notre robot : la réalisation d'un châssis, la création d'une carte électronique et la programmation du mouvement de chasse. Pour notre projet, nous nous concentrerons sur la fabrication du cadre du robot par imprimante 3D. Pour les 2 dernières parties, nous utiliserons une carte Arduino à l'aide d'un shield pour réaliser les connexions entre les différents composants.
Entrée 2 : 31 janvier 2019
Durant cette séance, nous avons développé les premiers plans de notre machine ; nous sommes partis sur une reproduction d'un 4x4 de type exploration safari, souvent utilisé pour la chasse de bêtes exotiques.
Entrée 3 : 4 février 2019
Nous avons étudié l'architecture et la programmation de la carte Arduino afin de procéder à la gestion des capteurs nécessaires à l'évolution de notre prédateur dans son environnement.

Bouclier : schéma original
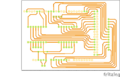
Bouclier : circuit imprimé original


Tout d'abord, nous avons téléchargé les fichiers présents sur le wiki, et étudié le bouclier du robot avec Fritzing. Nous avons aussi récupéré un robot pour "emprunter " ses pièces. Nous avons modélisé ces pièces pour les intégrer dans le plan 3D de la structure de notre robot.
Entrée 4 : 11 février
Robin a commencé la modélisation de certains composants pour notre robot, notamment les roues, la roue folle et le capteur à ultrason ; nous mettrons nos résultats sur cette page. Nous avons continué l'étude du shield du robot. Nous avons ajouté un second capteur ultrason pour le déplacement, et 3 capteurs IR pour détecter la présence ou non de la proie.
Entrée 5 : 25 février
Au cours de cette séance, nous avons continué la prise en main de Fritzing et des plans du bouclier de notre robot ; cela nécessitera des optimisations dans les schémas, ce que l'on continuera à faire au cours des prochaines séances. Nous avons également commencé la prise en main des capteurs IR ; nous allons, la prochaine séance, tester le code pour maitriser cette technologie.
Entrée 6 : 28 février
Après avoir (péniblement et avec l'aide des encadrants) réussi à récupérer la librairie de gestion des infrarouges, nous avons effectué quelques tests avec une télécommande. Nous avons constaté que, au moindre trou devant l'émetteur de rayons IR, le capteur annonçait des valeurs. Il faudra également, à la prochaine séance, se renseigner sur la librairie pour savoir sur quel port on peut brancher le capteur, pour avoir plusieurs capteurs IR sur notre robot.
Entrée 7 : 4 mars
De nouveaux essais pour les capteurs IR fructueux ! Nous avons réussi à capter un signal IR sur plusieurs ports PIN Arduino, en utilisant des ports avec interruptions externes. Nous avons utilisé une librairie issue de Adafruit (https://github.com/cyborg5/IRLib2), puis employé une fonction Rawrecv pour effectuer nos tests. Nous allons désormais nous consacrer à créer notre shield, en prenons en compte les différents éléments.
Entrée 8 : 7 mars
Après nos essais fructueux avec les capteurs infrarouges, nous avons essayé les détecteurs ultrason. Le code que nous avons récupéré fonctionne bien, et marche avec 2 capteurs. Les prochaines séances seront consacrés à la finalisation du circuit imprimé de la carte Arduino. Il faudra la réaliser au plus vite, pour l'utiliser au plus vite.
Entrée 9 : 11 mars
Au cours de cette séance, nous nous sommes concentrés sur le bouclier de notre robot. Il faudra le terminer pour la prochaine séance, et le faire corriger pour que l'on puisse l'obtenir avant la fin du BE. Robin a également, à l'aide du logiciel Fusion, gratuit pour les étudiants, réalisé la conception 3D des composants de notre robot. + IMAGES
Entrée 10 : 14 mars
Au cours de cette séance, nous avons complétement réorganisé les connexions sur notre shield. Malheureusement, nous n'avons pas pu terminé la carte à la fin de cette séance. Nous allons donc la finir au cours de la prochaine séance, pour qu'elle puisse nous parvenir avant la fin du Bureau d'étude.
Entrée 11 : 18 mars
Toujours sur le bouclier ; nous avons ajouté les LED de contrôle, un bouton et une LED IR pour que les proies puissent nous repérer pour tenter de nous échapper.
Entrée 12 : 21 mars
Nous aons (enfin !) terminé le shield pour notre robot. Il nous reste désormais à réaliser le châssis (partie de Robin, grâce à l'utilisation du (superbe) logiciel Fusion 360) et obtenir du code, plutôt ma partie.
Entrée 13 : 25 mars
J'ai commencé à étudier le code pour le robot, notamment la gestion des capteurs en lien avec les moteurs.
Entrée 14 : 28 mars
Nous nous sommes concentrés sur le code pour Hunting Viper ;
Entrée 15 : 1 avril
Robin a commencé les soudures de notre shield. J'ai étudié avec Nathan, élève d'un autre binôme, le code pour le robot.
Entrée 16 : 4 avril
Continué les soudures. Groupe à moitié absent (CPP puis départ anticipé) ; besoin URGENT de faire le code et le châssis.
Entrée 17 : 25 avril
Au cours de cette séance (double), nous avons pu déterminer un châssis de base pour le robot, et nous avons commencé à effectuer des tests pour la gestion de la librairie Infrarouge avec les caches ; ces derniers sont très efficaces, les capteurs n'étant capable que de signaler un retour que dans une très fine bande, à la hauteur du capteur. Nous allons essayer ce code pour les 3 capteurs en simultané. Nous lancerons également la construction du chassis au cours de la prochaine séance.
Entrée 18 : 29 avril
Les capteurs IR ne souhaitent pas fonctionner, du coup il faudra reprendre le code pour les faire fonctionner. Il faudra également voir le code pour les moteurs.
Entrée 19 : 2 mai
Robin a dû recommencer le châssis ; celui en 3D prenant trop de temps, il faut désormais faire un châssis avec la découpeuse 3D. De mon côté, j'ai essayé d'utiliser le code pour les IR avec 3 capteurs, malheureusement la librairie ne supportait pas d'utiliser 3 capteurs sur 3 PIN différentes ; je devrais donc utiliser une autre version de cette librairie pour l'utiliser comme prévu.
Entrée 20 : 6 mai
L'heure de la réussite est enfin arrivée : j'ai trouvé une librairie qui permet de gérer 3 capteurs IR en même temps sur 3 broches différentes, et elle fonctionne ! Le code peut donc entrer dans sa phase finale : dès que le capteur du milieu réagit à une impulsion, le robot chargera dans sa direction ; dans le cas contraire, il tournera pour rechercher le signal. De son côté, Robin a modélisé un châssis en bois et lui a fait prendre forme. Malheureusement, ce dernier est trop petit, il faudra donc en réaliser un de plus grande taille.
Entrée 21 : 9 mai
Au cours de cette séance, Robin a réalisé le nouveau châssis en bois plus grand ; il l'assemblera au cours de la séance suivante. De mon côté, j'ai terminé une première version du code ; il faudra le tester quand le robot sera assemblé.
Entrée 22 : 16 mai
J'ai terminé un autre code semblable mais un peu différent ; le travail de vérification ne pourra se faire que quand le Hunting Viper aura pris forme.