Binome2018-5
Sommaire
Objectif à atteindre
Au cours de ce Bureau d'Etude, il nous a été demandé de réaliser un robot, soit dans la catégorie prédateur, soit dans la catégorie proie ; nous avons choisi de nous orienter vers un modèle prédateur, parce que ... le frisson de la chasse ! Le nom de notre projet : "Hunting Viper".
Journal de bord
Entrée 1 : 14 janvier 2019
Au cours de cette séance, les encadrants nous ont expliqués les principales composantes de notre robot : la réalisation d'un châssis, la création d'une carte électronique et la programmation du mouvement de chasse. Pour notre projet, nous nous concentrerons sur la fabrication du cadre du robot par imprimante 3D. Pour les 2 dernières parties, nous utiliserons une carte Arduino.
Entrée 2 : Jeudi 31 janvier 2019
Durant cette séance, nous avons développé les premiers plans de notre machine ; nous sommes partis sur une reproduction d'un 4x4 de type exploration safari, souvent utilisé pour la chasse de bêtes exotiques.
Entrée 3 : 4 février 2019
Nous avons étudié l'architecture et la programmation de la carte Arduino afin de procéder à la gestion des capteurs nécessaires à l'évolution de notre prédateur dans son environnement.

Bouclier : schéma
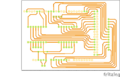
Bouclier : circuit imprimé


Tout d'abord, nous avons téléchargé les fichiers présents sur le wiki, et étudié le bouclier du robot sous Fritzing. Nous avons aussi récupéré un robot pour "emprunter " ses pièces.