RobotCompetition2014-3
Introduction :
Le but de ce bureau d'étude est, pour notre groupe, de concevoir un robot joueur en LEGO Mindstorm. Pour cela notre robot doit être capable de repérer la balle et ensuite avancer vers elle. Il doit aussi pouvoir la prendre, faire une rotation en direction du but adverse et tirer. Nous voulons avant tout, construire notre robot selon nos exigences, ensuite le programmé en fonction de la balle, et pour finir le programmé en fonction des buts et de l'arbitre.
Première étape : La construction :
Avant de commencer cette étape nous avons effectuer plusieurs recherches internet pour se donner une idée de la forme que pouvez avoir notre robot. Nous n'avons rien trouver de conforme à nos exigences et nous avons donc décidé de l'assembler selon notre instinct.
Nous voulions dans un premier temps avoir un robot avec trois roues : Deux devants et une à l'arrière, pour faciliter les rotations. les deux devants sont reliées à des moteurs alors que celle à l'arrière est libres, elle sert à stabiliser le robot.
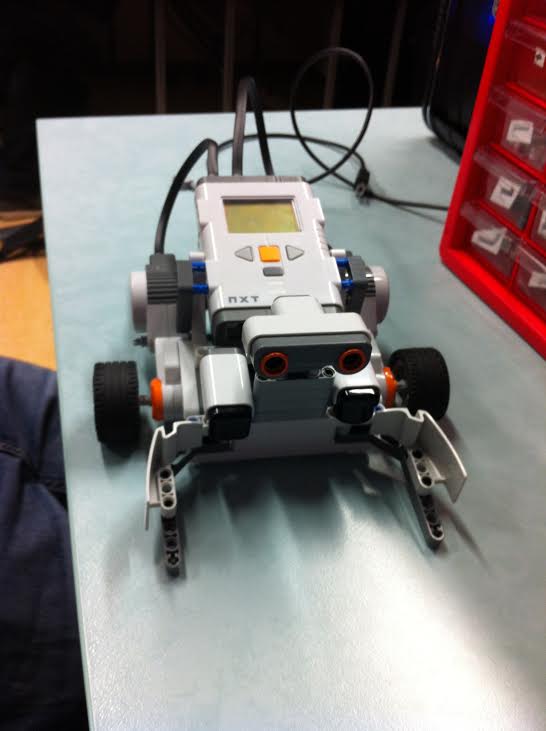

Notre second critère était que le robot devait être léger pour faciliter ses déplacements. On s'est vite rendu compte que cela n'était pas possible car pas assez stables. A cause d'un problème de couple au niveau des deux roues avants, nous avons dû ajouter des fixations et donc augmenter le poids du robot. Cette idée fut donc vite abandonné.
Ensuite, nous avons rajouté des "pinces" à l'avant car l'idée de base était que le robot n'avait cas effectuer une rotation rapide en direction du but une fois que la balle se trouvait dans ces "pinces" pour tirer, mais cela était inefficace. Nous nous sommes donc penchés vers un système avec un moteur et un balancier pour tirer et pouvant au préalable capturer la balle.